

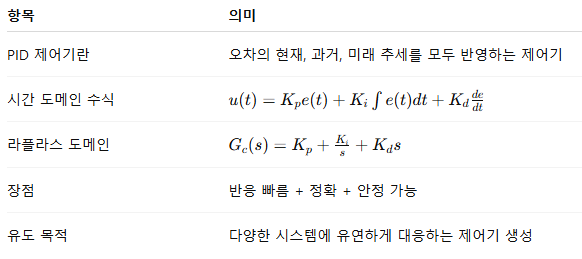
📘 PID 제어기의 수식 유도
✅ 1. 제어 시스템의 기본 전제
목표값 r(t) 와 실제 출력 y(t) 의 차이인 오차(error)를 다음과 같이 정의합니다:

✅ 2. PID 제어기의 시간 영역 수식
PID는 오차 e(t) 에 대해 세 가지 항을 조합한 방식입니다:


✅ 3. 각 항의 의미

✅ 4. 라플라스 변환 (주파수 영역)
제어 설계는 일반적으로 시간 영역보다 라플라스 변환 후 s-도메인에서 합니다.
PID의 라플라스 변환 결과:

→ 인수 정리:
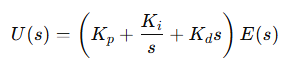
→ 즉, PID 제어기의 전달함수는 다음과 같습니다:

✅ 5. PID 제어기의 장점
- P: 반응이 빠름, 하지만 오차 제거는 못함
- PI: 정적 오차 제거 가능, 진동 생기기 쉬움
- PD: 진동 억제, 그러나 오차 남을 수 있음
- PID: 빠르게 도달하고 정확하며 안정적 (→ 조정은 필요함)
✅ 6. PID를 실제로 적용할 때는?
- 각 항을 조합해 원하는 성능 (속도, 안정성, 정확도)을 얻음
- Kp,Ki,는 실험적으로 또는 수치적으로 조정됨
- 제어대상이 불안정하거나 진동이 심할 경우 D 항이 필수적
📦 요약
'Engineering > 제어공학' 카테고리의 다른 글
| 복소평면에서의 실수축과 허수축 (0) | 2025.06.21 |
|---|---|
| 극점(Pole)과 안정성 해석 (0) | 2025.06.21 |
| PID 제어기 시뮬레이션 코드 (0) | 2025.06.21 |
| 최종값, 오버슈트, 정착 시간, 상승 시간 자동 계산 코드 (0) | 2025.06.20 |
| 제어공학에서 말하는 감쇠(감쇠비, damping) 의 개념 (0) | 2025.06.20 |