

제어공학에서는 현실 세계의 시스템(예: 모터, 온도, 속도 등)을
수학적으로 표현해서
정확하고 예측 가능한 제어를 할 수 있도록 만든다.
✅ 1. 왜 수학 모델이 필요한가?
제어는 “어떻게 반응할지” 예측하고 결정하는 작업입니다.
하지만 현실의 시스템은 복잡하고 비선형적이기 때문에,
먼저 **수식(모델)**로 단순화해야 시뮬레이션하고 제어 설계를 할 수 있습니다.
❓ 예시: RC 회로
간단한 저항(R)과 축전기(C)로 이루어진 회로
- 입력: 전압 Vin(t)
- 출력: 축전기 전압 Vout(t)
- 수식:

→ 이런 형태의 미분방정식으로 시스템을 모델링합니다.
✅ 2. 전달함수 (Transfer Function)란?
입력과 출력의 관계를 라플라스 변환을 이용해 간단한 비율로 표현한 것

이 전달함수를 사용하면, 시스템의 응답 특성을 아주 빠르게 분석할 수 있습니다.
✅ 3. 라플라스 변환이란?
시간에 따라 변하는 함수 → 복잡한 미분을 단순한 곱셈으로 바꾸는 도구
핵심 개념:
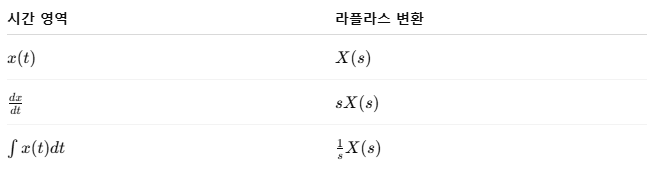
→ 미분방정식을 대수식으로 바꿔 쉽게 다룰 수 있게 됩니다.
✅ 4. 1차 시스템 예시: RC 회로
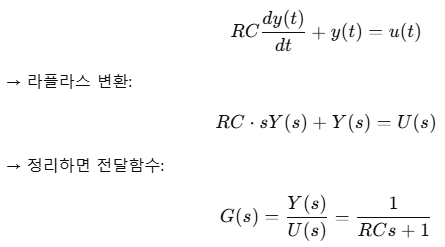
→ 이게 1차 시스템 전달함수입니다.
✅ 5. 2차 시스템 예시: 질량-스프링-댐퍼

→ 이것이 2차 시스템의 전달함수입니다.
✅ 6. 전달함수의 의미
전달함수는 아래를 도와줍니다:
- 시스템이 얼마나 빠르게 반응하는지 (응답 속도)
- 진동이 있는지, 안정한지 (감쇠율)
- 목표값에 도달하는지 (정상 상태 오차)
- 외부에서 영향을 얼마나 받는지
🧠 실용 정리
| 개념 | 설명 |
| 전달함수 | 입력/출력 관계를 s-도메인에서 나타낸 것 |
| 라플라스 변환 | 시간-미분 문제 → 대수 문제로 단순화 |
| 1차 시스템 | 응답이 단순, 설정값에 천천히 접근 |
| 2차 시스템 | 진동 포함 가능, 속도/감쇠 조절 가능 |
'Engineering > 제어공학' 카테고리의 다른 글
| 시스템 응답 분석 (0) | 2025.06.20 |
|---|---|
| 1차 시스템의 단위 계단 응답 Python 시뮬레이션 (0) | 2025.06.20 |
| 라플라스 변환 후에는 ‘s’를 쓰는 이유 (0) | 2025.05.17 |
| 제어공학 기초 개념 (0) | 2025.05.13 |
| 제어공학이 프로그래밍과 다른 점 (0) | 2025.05.13 |